Un robot humanoide és un robot dissenyat per assemblar-se a un ésser humà, tant en l’aspecte com en la manera d’actuar.
La construcció d’un robot d’aquest tipus pot tenir diversos objectius, com ara l’estudi de la locomoció bípeda o la interacció en un entorn humà, com que hem construït el món a la nostra mida, es lògic que els robots que han d’interactuar amb el nostre món se’ns assemblin.
En general, els robots humanoides tenen les mateixes parts que té un ésser humà (un tors, un cap, dos braços i dues cames), encara que en alguns casos es pot modelar només una part del cos, per exemple, de la cintura cap amunt. Alguns robots humanoides poden tenir caps dissenyats per replicar els trets facials humans, com ara els ulls i la boca.
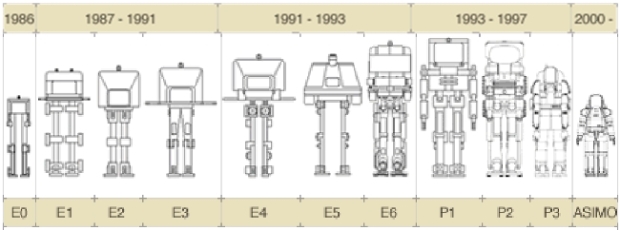
Per mostrar l’evolució d’aquest tipus de robots agafaré com a exemple el progrés de l’empresa Honda.
 Resultat d’aquest estudi va ser el E0, un robot que era capaç d’aguantar-se sobre les dues cames sense perdre l’equilibri i desplaçar-se a una velocitat d’un pas cada 5 segons, només es van fer les cames.
Resultat d’aquest estudi va ser el E0, un robot que era capaç d’aguantar-se sobre les dues cames sense perdre l’equilibri i desplaçar-se a una velocitat d’un pas cada 5 segons, només es van fer les cames.
Honda va començar a amb el disseny de robots bípedes al 1986. Per fer-ho possible van haver d’estudiar les articulacions de les cames dels éssers humans, la forma i la funció que fan en el moviment al caminar.

Entre l’any 1987 i l’any 1993 es va millorar la manera de caminar construint les versions E1, E2, E3 i E4. Tenien una aparença similar a la que tenia l’E0, el
que vol dir que només es van construir les cames, però van aconseguir que cada cop el seu pas fos més ràpid.
Finalment al 1993 el model E4 ja era capaç d’anar a la velocitat de marxa de un ésser humà, uns 4,7 quilòmetres/hora. Al mateix any, el model E5 va ser el primer robot autònom. El model E6 va ser el darrer d’aquesta sèrie. Es van completar les funcions bàsiques de caminar a dues cames de forma estable i ja era capaç de pujar escales i sortejar alguns obstacles.
A pa rtir de l’any 1993 van desenvolupar robots amb cos, braços i cap, aquests ja podien agafar objectes i obrir algunes portes. El primer va ser el P1, que feia 1.91 metres d’alçada i pesava 175 quilos.
rtir de l’any 1993 van desenvolupar robots amb cos, braços i cap, aquests ja podien agafar objectes i obrir algunes portes. El primer va ser el P1, que feia 1.91 metres d’alçada i pesava 175 quilos.
Al 1996 el P2 va ser el primer en no necessitar cables per caminar: portava una motxilla amb un ordinador, motors, una bateria, una ràdio sense fils i altres dispositius que el feien funcionar. Podia pujar i baixar escales i empènyer objectes. Feia 1,82 metres d’alçada i pesava 210 quilos. S’introduïren giroscopis de fibra òptica, sensors d’inclinació, sensors de força de reacció del sòl i quatre càmeres. Comença a caminar sobre superfícies irregulars. Podia resistir i retrocedir si se l’empenyia i preveure col·lisions. Malgrat totes les millores encara era massa gran i pesat, i el seu temps de funcionament autònom era de només 15 minuts.El P3 feia 1,60m d’alçada i pesava 130 quilos. Va ser el primer model completament independent i visualment ja s’assemblava a un ésser humà.
A l’any 2000 van presentar l’ASIMO. Feia 1,2 m d’alçada i 52 quilos de pes. Podia caminar a 1,6 quilòmetres/hora, tenia 30 minuts seguits d’autonomia i les bateries tan sols necessitaven 4 hores per recarregar-se.

En el disseny d’ASIMO, es va estudiar la forma de les mans del robot i la seva posició per tenir accés a objectes, com ara manetes de portes, interruptors de llum, endolls elèctrics i altres dispositius de l’entorn de la vida diària. La ubicació dels colzes i les espatlles del robot també estan fets per l’altura normal d’escriptoris i taules de treball. ASIMO és el primer robot d’Honda que és capaç de funcionar tant a dins de casa com a l’exterior.
Honda només és un exemple del progrés dels robots humanoides, hi ha moltes empreses que actualment estan desenvolupant aquesta tecnologia:
- ABB: Yumi

L’empresa ABB ha creat un robot que només té la part del tors i els braços. Està dissenyat especialment per treballar juntament amb les persones, per aquest motiu les articulacions estan fetes de tal manera que una persona no es pugui fer mal.
- SOFTBANKROBOTICS: Nao

NAO és el primer robot que aquesta empresa va desenvolupar i ha conquerit el món acadèmic. Ha anat evolucionant contínuament des de la seva primera versió al 2006. Es pot personalitzar a gust de l’usuari d’acord amb les seves necessitats i la seva capacitat inventiva.
https://www.youtube.com/watch?v=EonsuxKyYNE
- SOFTBANKROBOTICS: Romeo

Romeo és un robot dissenyat per investigació i recerca, però principalment està pensat per ajudar a les persones d’edat avançada o a persones amb poca autonomia. La seva alçada de 140 centímetres pot obrir portes, pujar escales i poder agafar objectes de sobre una taula.
Es va començar a desenvolupar al gener de 2009, tenia quatre objectius principals:
- La construcció d’una plataforma de programari oberta i flexible mecatrònica i interactiu
- El desenvolupament d’un robot assistent personal amb funcions de vigilància i interfícies home-màquina apropiades
- El desenvolupament d’una plataforma sòlida per a la investigació
- Establir les bases d’un ecosistema robòtic industrial
- SOFTBANKROBOTICS: Pepper

El robot evoluciona amb l’usuari. Memoritza gradualment trets de la seva personalitat, les seves preferències, i s’adapta als seus gustos i hàbits. Es pot personalitzar mitjançant la descàrrega de les aplicacions de programari, en funció de l’estat d’ànim o l’ocasió.És el primer robot humanoide capaç de reconèixer les principals emocions humanes i adaptar el seu comportament a l’estat d’ànim del seu interlocutor. Segons el to de la veu de l’usuari, l’expressió a la cara, els seus moviments corporals i les paraules que fa servir, pot interpretar el seu estat d’ànim i adequar la resposta a través del color dels seus ulls, la tauleta o el to de veu.
https://www.ald.softbankrobotics.com/en/cool-robots/pepper/find-out-more-about-pepper
- TOSHIBA: ChihiraAico

A la CES (Consumer Technology Association) de l’any 2015 a Las Vegas, Toshiba va presentar el seu robot humanoide ChihiraAico o com l’anomenen “androide de comunicació”, dissenyat conjuntament amb l’Institut Tecnològic de Shibaura i l’Institut Tecnològit Shonan.
Des de mitjans del 2015 un robot anomenat Aiko Chihira, està al mostrador d’informació d’una botiga i donant informació en japonès a través d’àudios de 6 minuts, es pretén millorar-lo afegint-li més funcions, parlarà en japonès, anglès i xinés, i podrà interactuar amb el visitants.Porta 45 actuadors a braços i mans que el fan capaç de comunicar-se mitjançant el llenguatge de signes.
https://www.youtube.com/watch?v=izH08FB2mxU
- HIROSHI ISHIGURO LABORATORIES & ATR
Aquesta empresa es dedica a fer Geminoids. Un Geminoid és un androide que s’assembla molt a un individu en concret. Aq uest projecte està enfocat des d’un punt de vista més aviat artístic i filosòfic.
uest projecte està enfocat des d’un punt de vista més aviat artístic i filosòfic.
S’estudia quin efecte poden tenir en la societat les interaccions entre els robots i persones normals, que no saben que estan tractant amb un robot. Al ser robots controlats remotament, també s’estudia l’impacte que té sobre l’operador.
http://www.geminoid.jp/en/index.html
- TOYOTA: Kibo
Kibo, és l’últim producte de Toyota, és un humanoide en miniatura desenvolupat per ajudar a combatre la solitud.
És capaç de reconèixer expressions facials gràcies a una càmera interna i així identifica l’estat d’ànim del propietari, i ajusta la seva forma de parlar i els seus moviments. Pot començar una conversa casual de forma espontània, recordant anècdotes que se li hagin explicat, les preferències de l’usuari o informació de dispositius com el vehicle o la llar.
Està dissenyat per anar com a copilot, fa un petit crit quan detecta una frenada brusca o una corba exagerada o dona conversa si nota que el conductor s’avorreix o s’adorm.
http://www.toyota-global.com/events/motor_show/2015-tokyo/kirobo/
